Science Fiction
Dictionary
A B C D E F G H I J K L M N O P Q R S T U V W X Y Z
 |
Robot Accepts Gesture Commands

A robot able to accept gesture commands was announced by Brown University researchers. The group demonstrated that structured light-based depth sensing with standard perception algorithms can enable mobile peer-to-peer interaction between humans and robots. The gesture-command robot is based on iRobot's Packbot. iRobot also participated in funding along with DARPA.
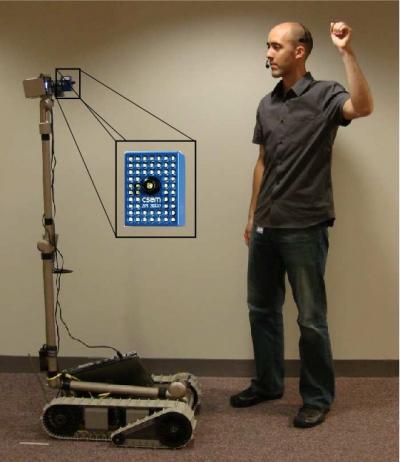
(Robot accepts gesture commands
[The boxed area denotes an inset detail; it's not part of the structure of the robot])
"We have created a novel system where the robot will follow you at a precise distance, where you don't need to wear special clothing, you don't need to be in a special environment, and you don't need to look backward to track it," said Chad Jenkins, assistant professor of computer science at Brown University and the team's leader.
Other contributors to the research include Matthew Loper, a Brown graduate student and lead author on the paper announcing the research. Contributors include former Brown graduate student Nathan Koenig, now at the University of Southern California; former Brown graduate student Sonia Chernova; and Chris Jones, a researcher with the Massachusetts-based robotics maker iRobot Corp.
The researchers made two key advances with their robot. The first involved what scientists call visual recognition. Applied to robots, it means helping them to orient themselves with respect to the objects in a room. "Robots can see things," Jenkins explained, "but recognition remains a challenge."The team overcame this obstacle by creating a computer program, whereby the robot recognized a human by extracting a silhouette, as if a person were a virtual cutout. This allowed the robot to home in on the human and receive commands without being distracted by other objects in the space.
"It's really being able to say, 'That's a person I'm looking at, I'm going to follow that person,'" Jenkins said.
The second advance involved the depth-imaging camera. The team used a CSEM Swiss Ranger, which uses infrared light to detect objects and to establish distances between the camera and the target object, and, just as important, to measure the distance between the camera and any other objects in the area. The distinction is key, Jenkins explained, because it enabled the Brown robot to stay locked in on the human commander, which was essential to maintaining a set distance while following the person.
(Robot obeys commands from human user [29M mpeg])
Douglas Adams wrote about the idea of a gesture-controlled system in his 1979 blockbuster The Hitchhiker's Guide to the Galaxy. He also illustrated some potential problems with such a system.
The machine was rather difficult to operate. For years radios had been operated by means of pressing buttons and turning dials; then as the technology became more sophisticated the controls were made touch-sensitive--you merely had to brush the panels with your fingers; now all you had to do was wave your hand in the general direction of the components and hope. It saved a lot of muscular expenditure, of course, but meant that you had to sit infuriatingly still if you wanted to keep listening to the same program.Zaphod waved a hand and the channel switched again.
(Read more about the Gesture-Controlled Device )
I'd like to see this gesture control interface added onto the feature set of DARPA's BigDog robot; take a look at this recent BigDog video below.
Wave your mouse at these gesture-aware robot and interface links:
- BERTI Robot Gestures, Plays Rock-Paper-Scissors
Obviously the perfect companion for the Brown research robot; somebody needs to get these two bots together. - JVC Clapper Gesture Recognition TV
JVC demonstrated a handclap and gesture recognition TT, apparently unaware that American "clapper" technology leads the world. - Gesture-Controlled TV Update
I've been gesturing at my TV for years - but I haven't been able to control anything...
Via Eurekalert. You can also download a video from their website at Brown; see Mobile Human-Robot Teaming Enabled by Depth-Imaging .
Scroll down for more stories in the same category. (Story submitted 3/11/2009)
Follow this kind of news @Technovelgy.| Email | RSS | Blog It | Stumble | del.icio.us | Digg | Reddit |
Would
you like to contribute a story tip?
It's easy:
Get the URL of the story, and the related sf author, and add
it here.
Comment/Join discussion ( 0 )
Related News Stories - (" Robotics ")
Pole-Dancing Stripperbot Robot
'Why, a clockwork dancer, or, better still, one that would go by electricity and never run down...' - Jerome K. Jerome, 1893.
VaMEx Biomimetic Mars Robot Inspired By Skink
'Across the ground something small and metallic came, flashing in the dull sunlight of midday.' - Philip K. Dick, 1953.
DIY Robotic Content Farming
'The chief wheeled to the master machine and pressed a button.' - Schachner and Zagat, 1931.
Vero Robotic Dog With Vacuum Cleaner Feet
'Out of warrens in the wall, tiny robot mice darted.'
Technovelgy (that's tech-novel-gee!) is devoted to the creative science inventions and ideas of sf authors. Look for the Invention Category that interests you, the Glossary, the Invention Timeline, or see what's New.
Science Fiction
Timeline
1600-1899
1900-1939
1940's 1950's
1960's 1970's
1980's 1990's
2000's 2010's
Current News
Pole-Dancing Stripperbot Robot
'Why, a clockwork dancer, or, better still, one that would go by electricity and never run down...'
Collective Superintelligence Is At Hand!
'Maybe the individual intelligence of each Cubic pools into a group intelligence...'
Instant Journalists: Ordinary People With Cell Phones
'We'll show them whose planet this is!'
Health Kiosk Has No Human Doctor
'The electronic body analyzer had been developed...'
Meta's Horizon Studio's Unique Avatars From Text Prompts
'Looks like she has bought the Avatar Construction Set and put together her own...'
VaMEx Biomimetic Mars Robot Inspired By Skink
'Across the ground something small and metallic came, flashing in the dull sunlight of midday.'
NEO Brain Computer Interface (BCI)
'The remains of the lace took on the rough shape of a brain...'
Did Frank Herbert Predict Bistable Displays Like E-Ink?
'A broken circle with arrows pointing to a right-hand flow appeared in the chalf.'
Monolith One Giant Industrial Metal 3D-printer
'The object seemed melted together like wax nothing was distinguishable.'
'Mooncrete' Lunar Regolith Concrete (LRC)
'And here they began to build...'
China's 'Magpie Drone' Ornithopter
'Midges have many capabilities. To the untrained eye, they look like sparrows.'
MAI-Voice-2 Microsoft Text-To-Speech
'I made disks of my own voice to the number of five hundred very carefully chosen words.'
Tumblin' Tumbleweed Rovers To Eplore Mars
'His sensors out and working, and the whirring of the tape that sucked up sight and sound and shape and smell and form...'
Tentacled Robot Captures Space Debris
Preventing annoying space debris build-up.
Prufrock-MB2 Ready In Nashville
'It sounds to me as though you had invented a kind of metal earthworm.'
DIY Robotic Content Farming
'The chief wheeled to the master machine and pressed a button.'