Science Fiction
Dictionary
A B C D E F G H I J K L M N O P Q R S T U V W X Y Z
 |
Jollbot Robot Ball Jumps, Bounces And Rolls

Jollbot is a bouncing spherical robot developed by Rhodri Armour, a PhD student at the University of Bath. Jollbot presents a unique solution to the problem of navigating rough terrain here on Earth - and on other planets.
Take a look at this Jollbot video for a better look at its unique rolling jumping gait.
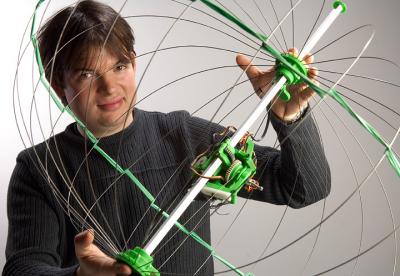
(Jollbot spherical jumping robot)
Jollbot is a spherical cage that can deform to perform jumping maneuvers; it can also roll in any direction when the terrain permits it. Mr. Armour explains the general idea:
"Others in the past have made robots that jump and robots that roll; but weve made the first robot that can do both.In nature there are two main types of jumping: hopping, like a kangaroo, which uses its fine control and direct muscle action to propel it along; and pause and leap, such as in a grasshopper, which stores muscle energy in spring-like elements and rapidly releases it to make the jump.
Weve made a robot that jumps in a similar way to the grasshopper, but uses electrical motors to slowly store the energy needed to leap in its springy skeleton.
Before jumping, the robot squashes its spherical shape. When it is ready, it releases the stored energy all at once to jump to heights of up to half a metre.
Science fiction fans have been prepared for this potential future. The Rovers from the late 1960's sci-fi television series The Prisoner were security balls of various sizes.

(The Rover seeks its prey)
In the television show, the Rovers were living creatures modeled to some extent on blowfish. They could alter their size and were equipped with toxins that could incapacitate prisoners who tried to escape (they would give chase to the fastest moving living creature). They could run faster than a man, just like the Rotundus robot. They also served as eyes and ears for the Village monitors. They were adapted for different environments, including undersea use.
It is interesting to note that Rhodri Armour plans to include a skin on the surface of Jollbot. He describes it as a "stretchy skin covered in solar cells on the outside of the robot, so it could power itself, and robotic control sensors to enable it to sense its environment."
Sounds like a Rover to me.
Update 04-Jun-2025: Compare this item with the spherical Ruum robot from The Ruum by Arthur Porges.
Jim Irwin had once worked with mercury, and for a second it seemed to him that a half-filled leather sack of the liquid metal had rolled into the clearing. For the quasi-spherical object moved with just such a weighty, fluid motion. But it was not leather; and what appeared at first a disgusting wartiness, turned out on closer scrutiny to be more like the functional projections of some outlandish mechanism. Whatever the thing was, he had little time to study it, for after the spheroid had whipped out and retracted a number of metal rods with bulbous, lens-like structures at their tips, it rolled towards him at a speed of about five miles an hour.
End update.
From University of Bath press release.
Scroll down for more stories in the same category. (Story submitted 12/6/2008)
Follow this kind of news @Technovelgy.| Email | RSS | Blog It | Stumble | del.icio.us | Digg | Reddit |
Would
you like to contribute a story tip?
It's easy:
Get the URL of the story, and the related sf author, and add
it here.
Comment/Join discussion ( 3 )
Related News Stories - (" Robotics ")
Pole-Dancing Stripperbot Robot
'Why, a clockwork dancer, or, better still, one that would go by electricity and never run down...' - Jerome K. Jerome, 1893.
VaMEx Biomimetic Mars Robot Inspired By Skink
'Across the ground something small and metallic came, flashing in the dull sunlight of midday.' - Philip K. Dick, 1953.
DIY Robotic Content Farming
'The chief wheeled to the master machine and pressed a button.' - Schachner and Zagat, 1931.
Vero Robotic Dog With Vacuum Cleaner Feet
'Out of warrens in the wall, tiny robot mice darted.'
Technovelgy (that's tech-novel-gee!) is devoted to the creative science inventions and ideas of sf authors. Look for the Invention Category that interests you, the Glossary, the Invention Timeline, or see what's New.
Science Fiction
Timeline
1600-1899
1900-1939
1940's 1950's
1960's 1970's
1980's 1990's
2000's 2010's
Current News
Pole-Dancing Stripperbot Robot
'Why, a clockwork dancer, or, better still, one that would go by electricity and never run down...'
Collective Superintelligence Is At Hand!
'Maybe the individual intelligence of each Cubic pools into a group intelligence...'
Instant Journalists: Ordinary People With Cell Phones
'We'll show them whose planet this is!'
Health Kiosk Has No Human Doctor
'The electronic body analyzer had been developed...'
Meta's Horizon Studio's Unique Avatars From Text Prompts
'Looks like she has bought the Avatar Construction Set and put together her own...'
VaMEx Biomimetic Mars Robot Inspired By Skink
'Across the ground something small and metallic came, flashing in the dull sunlight of midday.'
NEO Brain Computer Interface (BCI)
'The remains of the lace took on the rough shape of a brain...'
Did Frank Herbert Predict Bistable Displays Like E-Ink?
'A broken circle with arrows pointing to a right-hand flow appeared in the chalf.'
Monolith One Giant Industrial Metal 3D-printer
'The object seemed melted together like wax nothing was distinguishable.'
'Mooncrete' Lunar Regolith Concrete (LRC)
'And here they began to build...'
China's 'Magpie Drone' Ornithopter
'Midges have many capabilities. To the untrained eye, they look like sparrows.'
MAI-Voice-2 Microsoft Text-To-Speech
'I made disks of my own voice to the number of five hundred very carefully chosen words.'
Tumblin' Tumbleweed Rovers To Eplore Mars
'His sensors out and working, and the whirring of the tape that sucked up sight and sound and shape and smell and form...'
Tentacled Robot Captures Space Debris
Preventing annoying space debris build-up.
Prufrock-MB2 Ready In Nashville
'It sounds to me as though you had invented a kind of metal earthworm.'
DIY Robotic Content Farming
'The chief wheeled to the master machine and pressed a button.'