Science Fiction
Dictionary
A B C D E F G H I J K L M N O P Q R S T U V W X Y Z
 |
Obrero Robot Has The Soft Touch

Obrero is a prototype robot built to explore the concept of sensitive manipulation; its grasp is very soft because it uses sensors in its robotic hand when manipulating objects, rather than just relying on machine vision.
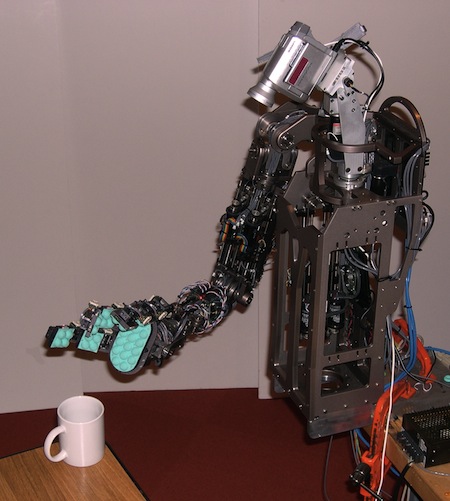
(Obrero robot with sensitive manipulation)
Obrero has 8 force sensors, 5 position sensors, 5 motors and 7 high resolution tactile sensors in its hands.
The hand was designed to be compliant. It has postion and force control of the fingers. Additionally, it has very sensitive tactile sensors. Each of the fingers has series elastic actuators in its joints. A finger has two mecahnical coupled links. However they can decouple to conform to an object. The thumb and the middle finger can also rotate using series elastic actuator. The tactile sensors were custom made for doing manipulation task.
Take a look at a just a few seconds video showing Obrero picking up a very flexible object - a bag of my favorite cookies! This is a compilation video; the Obrero robot portion is just from 2:40 to 3:15.
(Obrero robot video [starts at about 2:40])
Obrero is a robotic project being worked on by Eduardo Torres-Jara and supervised by MIT Professor Rodney A. Brooks. Dr. Brooks is a co-founder of iRobot; he left his post of CTO a year ago to found his own robotics company, Heartland Robotics.
On his website, he states that "I want to effect a powerful evolution in the world's labor markets, and my current focus is to develop low-cost robots that will empower American workers." Obrero is where he is starting to do this work.
As it turns out, science fiction fans have been in good (robotic) hands as far as imagining robot hands that are controlled both by touch and by sight. Read what sf Grandmaster Robert Heinlein writes in his 1956 story The Door Into Summer.
Hands I could order from the atomics-engineering equipment companies who supplied Hired Girl's hands, only this time I would want the best, with wide-range servos and with the delicate feedback required for microanalysis manipulations and for weighing radioactive isotopes...The ears I could buy from any of a dozen radio-TV houses - though I might have to do some circuit designing to have his hands controlled simultaneously by sight, sound, and touch feedback the way the human hand is controlled.
(Read more about Heinlein's robotic hands)
Take a look at the Obrero homepage; not much to see yet at the Heartland Robotics company website. Via NextBigFuture.
Scroll down for more stories in the same category. (Story submitted 10/6/2009)
Follow this kind of news @Technovelgy.| Email | RSS | Blog It | Stumble | del.icio.us | Digg | Reddit |
Would
you like to contribute a story tip?
It's easy:
Get the URL of the story, and the related sf author, and add
it here.
Comment/Join discussion ( 3 )
Related News Stories - (" Robotics ")
DIY Robotic Content Farming
'The chief wheeled to the master machine and pressed a button.' - Schachner and Zagat, 1931.
Vero Robotic Dog With Vacuum Cleaner Feet
'Out of warrens in the wall, tiny robot mice darted.'
Boy Makes Biomimetic Turtle Robot
't came out into plain view. Darkington glimpsed a slim body and six short legs of articulated dull metal.'
Origin F1 Humanoid Robot's Facial Skin
'I could look down at that face of carefully molded synthetic rubber, tinted the exact shade of the doctor's living flesh.' - Rog Philips, 1950.
Technovelgy (that's tech-novel-gee!) is devoted to the creative science inventions and ideas of sf authors. Look for the Invention Category that interests you, the Glossary, the Invention Timeline, or see what's New.
Science Fiction
Timeline
1600-1899
1900-1939
1940's 1950's
1960's 1970's
1980's 1990's
2000's 2010's
Current News
Prufrock-MB2 Ready In Nashville
'It sounds to me as though you had invented a kind of metal earthworm.'
DIY Robotic Content Farming
'The chief wheeled to the master machine and pressed a button.'
Reflect Orbital Sunlight On Demand
'I don't have to tell you about the seven two-mile-diameter orbital mirrors that circulate around the satellite, making it habitable.'
The Amazing Lightfoot Electric Scooter With Solar Assist
'The steel tortoise gave MacKinnon a feeling of Crusoe- like independence.'
Fully Electric, Fully Automated Vegetable‑growing Agribots
'...then back to their work, though little enough it was on these automatic cultivators.'
Vero Robotic Dog With Vacuum Cleaner Feet
'Out of warrens in the wall, tiny robot mice darted.'
AI Operates An Excavator
'So far as I could see, the thing was without a directing Martian at all.'
US Army IBEX Exoskeleton Walks Troops Out Of Danger
'The suit stands up and starts walking, gripping me round the calves and waist, taking the bulk of my weight off my throbbing feet.'
Boy Makes Biomimetic Turtle Robot
't came out into plain view. Darkington glimpsed a slim body and six short legs of articulated dull metal.'
Elon Musk Wants Data Centers In Space
'Internally its made up of millions of components, but the most important ones are the thinking and memory parts of the Mind proper.'
Origin F1 Humanoid Robot's Facial Skin
'I could look down at that face of carefully molded synthetic rubber, tinted the exact shade of the doctor's living flesh.'
Grok And The City Fathers From 'Cities In Flight' By James Blish
'Chris, the City Fathers are not interested in your welfare; I suppose you know that. They're interested in only one thing: the survival of the city.'
Why Not Move A Warehouse District?
'Did you never see a moving house before?'
Will An AI Found A New Religion?
'You must decide how you will worship Me.'
Terraformer Industries Make Methane
'Drake was the young spatial engineer he employed to terraform the little rock...'
I Need An Outdoor Spherical Display
'Usually a spherical display hovered in the centre...'