Science Fiction
Dictionary
A B C D E F G H I J K L M N O P Q R S T U V W X Y Z
 |
Prospero, Robotic Farmer

Prospero is a robotic farmer prototype presented by vanmunch in response to a robot challenge at Schmart Board.
As you can see in the picture below, Prospero is a hexapod robot; the intent is to take agricultural machinery (and agbots) in a different direction. Rather than use huge machines and crops measured by thousands of acres, why not try using smart robots to do farming on a plant-by-plant basis?
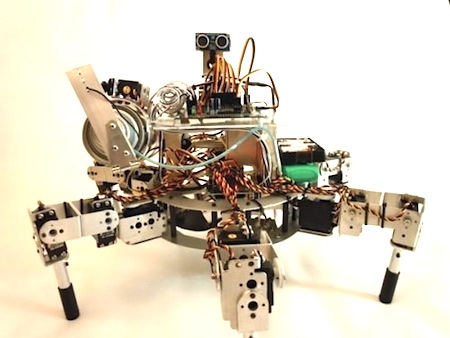
(Prospero, Robotic Farmer)
Prospero is an autonomous hexapod that can instantly change directions without turning its body, avoid objects, detect seeds (that it or another robot has planted), plant seeds at a specified spacing, mark/apply a pre-emergent herbicide &/or fertilizer and let other Prospero robots in the area know if it needs help planting seeds in its area or if the area has been planted. It's meant to be deployed as part of a larger group/ swarm and its behavior uses swarm and game theory......what if we were able to make farming decisions on a foot by foot or plant by plant basis? This would dramatically increase the productivity of the land, but you would also dramatically increase the number of people and the cost of business. This is a problem if you used people, but what about a swarm of simple, inexpensive robots?
(Prospero, Robotic Farmer video)
Philip K. Dick has a fairly early reference for the idea of farm robots in his 1955 story War Veteran; he mentions a robot gardener.
Update Feb-28-2015: I found an earlier and more complete reference; see the article for robot farmer from The Turning Wheel by Philip K. Dick (19540. End update.
Scroll down for more stories in the same category. (Story submitted 3/18/2011)
Follow this kind of news @Technovelgy.| Email | RSS | Blog It | Stumble | del.icio.us | Digg | Reddit |
Would
you like to contribute a story tip?
It's easy:
Get the URL of the story, and the related sf author, and add
it here.
Comment/Join discussion ( 0 )
Related News Stories - (" Agriculture ")
Fully Electric, Fully Automated Vegetable‑growing Agribots
'...then back to their work, though little enough it was on these automatic cultivators.' - John Campbell, 1931.
MK-V Smart Tractor - Fully Electric, Farmer Optional
'A small electric tractor was working at the far side, and a slight hum could be heard from where he sat.' - Warner Van Lorne, 1936
Vertical Farm In Singapore's Output Is 1.5 Tons Per Day
'A towering eighty-story structure like the office "In-and-Out" baskets stacked up to the sky.' - Pohl and Kornbluth, 1952.
Mashambas Skyscraper Farm Design Wins
'...a towering eighty-story structure like the office In-and Out baskets stacked up to the sky.' - Poh and Kornbluth, 1952.
Technovelgy (that's tech-novel-gee!) is devoted to the creative science inventions and ideas of sf authors. Look for the Invention Category that interests you, the Glossary, the Invention Timeline, or see what's New.
Science Fiction
Timeline
1600-1899
1900-1939
1940's 1950's
1960's 1970's
1980's 1990's
2000's 2010's
Current News
Biological War: A Scenario
'And now they wre busily transforming all their companions, and so on, and so on...'
Pole-Dancing Stripperbot Robot
'Why, a clockwork dancer, or, better still, one that would go by electricity and never run down...'
Collective Superintelligence Is At Hand!
'Maybe the individual intelligence of each Cubic pools into a group intelligence...'
Instant Journalists: Ordinary People With Cell Phones
'We'll show them whose planet this is!'
Health Kiosk Has No Human Doctor
'The electronic body analyzer had been developed...'
Meta's Horizon Studio's Unique Avatars From Text Prompts
'Looks like she has bought the Avatar Construction Set and put together her own...'
VaMEx Biomimetic Mars Robot Inspired By Skink
'Across the ground something small and metallic came, flashing in the dull sunlight of midday.'
NEO Brain Computer Interface (BCI)
'The remains of the lace took on the rough shape of a brain...'
Did Frank Herbert Predict Bistable Displays Like E-Ink?
'A broken circle with arrows pointing to a right-hand flow appeared in the chalf.'
Monolith One Giant Industrial Metal 3D-printer
'The object seemed melted together like wax nothing was distinguishable.'
'Mooncrete' Lunar Regolith Concrete (LRC)
'And here they began to build...'
China's 'Magpie Drone' Ornithopter
'Midges have many capabilities. To the untrained eye, they look like sparrows.'
MAI-Voice-2 Microsoft Text-To-Speech
'I made disks of my own voice to the number of five hundred very carefully chosen words.'
Tumblin' Tumbleweed Rovers To Eplore Mars
'His sensors out and working, and the whirring of the tape that sucked up sight and sound and shape and smell and form...'
Tentacled Robot Captures Space Debris
Preventing annoying space debris build-up.
Prufrock-MB2 Ready In Nashville
'It sounds to me as though you had invented a kind of metal earthworm.'